R-Car Salvator-X
Overview
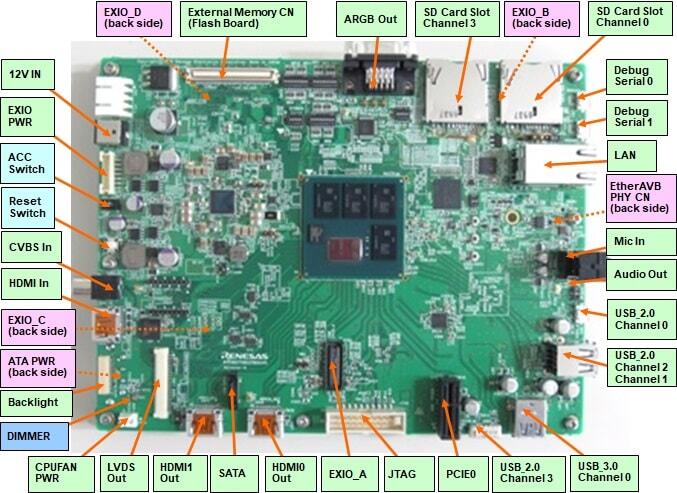
The H3 Salvator-X board is designed for evaluating the features and performance of the R-CAR H3 device from Renesas Electronics and it is also used for developing and evaluating application software for these R-CAR H3.
The H3 Salvator-X, based on the R-CAR H3 SIP, comes with LPDDR4 @4GB in 2-channel, each 64-bit wide+Hyperflash @64MB, CSI2 interfaces and several communication interfaces like USB, Ethernet, HDMI and can work standalone or can be adapted to other boards, via 440pin connector on bottom side.
More information about the H3 SoC can be found here: Renesas R-Car H3 chip
Hardware
Hardware capabilities for the H3 Salvator-X for can be found on the eLinux H3 Salvator-X page.
Note
Zephyr will be booted on the CR7 processor provided for RTOS purpose.
More information about the board can be found at Renesas R-Car Development Support website.
Supported Features
The rcar_salvator_x board supports the hardware features listed below.
- on-chip / on-board
- Feature integrated in the SoC / present on the board.
- 2 / 2
-
Number of instances that are enabled / disabled.
Click on the label to see the first instance of this feature in the board/SoC DTS files. -
vnd,foo -
Compatible string for the Devicetree binding matching the feature.
Click on the link to view the binding documentation.
rcar_salvator_x/r8a77951/r7 target
On-target memory for this board target: 32512 KiB of RAM, N/A of Flash.
Type |
Location |
Description |
Compatible |
|---|---|---|---|
CPU |
on-chip |
ARM Cortex-R7 CPU1 |
|
CAN |
on-chip |
Renesas R-Car CAN controller1 |
|
Clock control |
on-chip |
Renesas R8A7795 SoC Clock Pulse Generator / Module Standby and Software Reset1 |
|
GPIO & Headers |
on-chip |
||
I2C |
on-chip |
Renesas R-Car I2C controller2 |
|
Input |
on-board |
Group of GPIO-bound input keys1 |
|
Interrupt controller |
on-chip |
ARM Generic Interrupt Controller v21 |
|
LED |
on-board |
Group of GPIO-controlled LEDs1 |
|
Pin control |
on-chip |
Renesas R-Car Gen3/4 Pin Function Controller1 |
|
PWM |
on-chip |
Renesas R-Car PWM controller1 |
|
Serial controller |
on-chip |
||
SRAM |
on-chip |
Generic on-chip SRAM1 |
|
Timer |
on-chip |
Renesas R-Car CMT timer1 |
Note
It is recommended to disable peripherals used by the R7 core on the Linux host.
Connections and IOs
GPIO
By running Zephyr on H3 Salvator-X, the software readable push buttons ‘SW20’, ‘SW21’, ‘SW22’ can be used as input, and the software contollable LEDs ‘LED4’, ‘LED5’, ‘LED6’ can be used as output.
UART
Salvator-X board is providing two serial ports:
one is for A53/A57 processors
the other one is for CR7
Both ports are converted to USB through CP2102 converters and they are exposed as follows:
Connector |
Processor |
|---|---|
CN25 |
A53/A57 |
CN26 |
CR7 |
Programming and Debugging
The rcar_salvator_x board supports the runners and associated west commands listed below.
| flash | debug | rtt | attach | debugserver | |
|---|---|---|---|---|---|
| openocd | ✅ (default) | ✅ (default) | ✅ | ✅ | ✅ |
Build and flash applications as usual (see Building an Application and Run an Application for more details).
Supported Debug Probe
The “Olimex ARM-USB-OCD-H” probe is the only officially supported probe. This probe is supported by OpenOCD that is shipped with the Zephyr SDK.
The “Olimex ARM-USB-OCD-H” probe needs to be connected to CN1 on Salvator-X.
Configuring a Console
Connect a USB cable from your PC to CN25 and/or CN26 then use the following settings with your serial terminal of choice (minicom, putty, etc.):
Speed: 115200
Data: 8 bits
Parity: None
Stop bits: 1
Flashing
First of all, open your serial terminal.
Applications for the rcar_salvator_x board configuration can be built
in the usual way (see Building an Application for more details).
# From the root of the zephyr repository
west build -b rcar_salvator_x samples/hello_world
west flash
You should see the following message in the terminal:
*** Booting Zephyr OS build v2.6.0-rc1 ***
Hello World! rcar_salvator_x
Debugging
First of all, open your serial terminal.
Here is an example for the Hello World application.
# From the root of the zephyr repository
west build -b rcar_salvator_x samples/hello_world
west debug
You will then get access to a GDB session for debug.
By continuing the app, you should see the following message in the terminal:
*** Booting Zephyr OS build v2.6.0-rc1 ***
Hello World! rcar_salvator_x