LE Controller
Overview
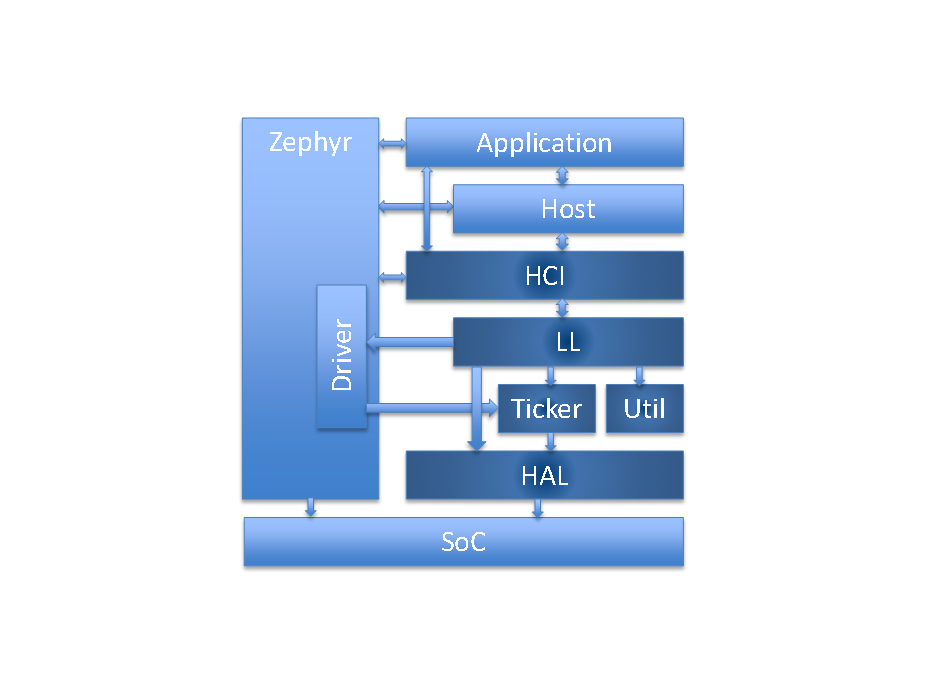
HCI
Host Controller Interface, Bluetooth standard
Provides Zephyr Bluetooth HCI Driver
HAL
Hardware Abstraction Layer
Vendor Specific, and Zephyr Driver usage
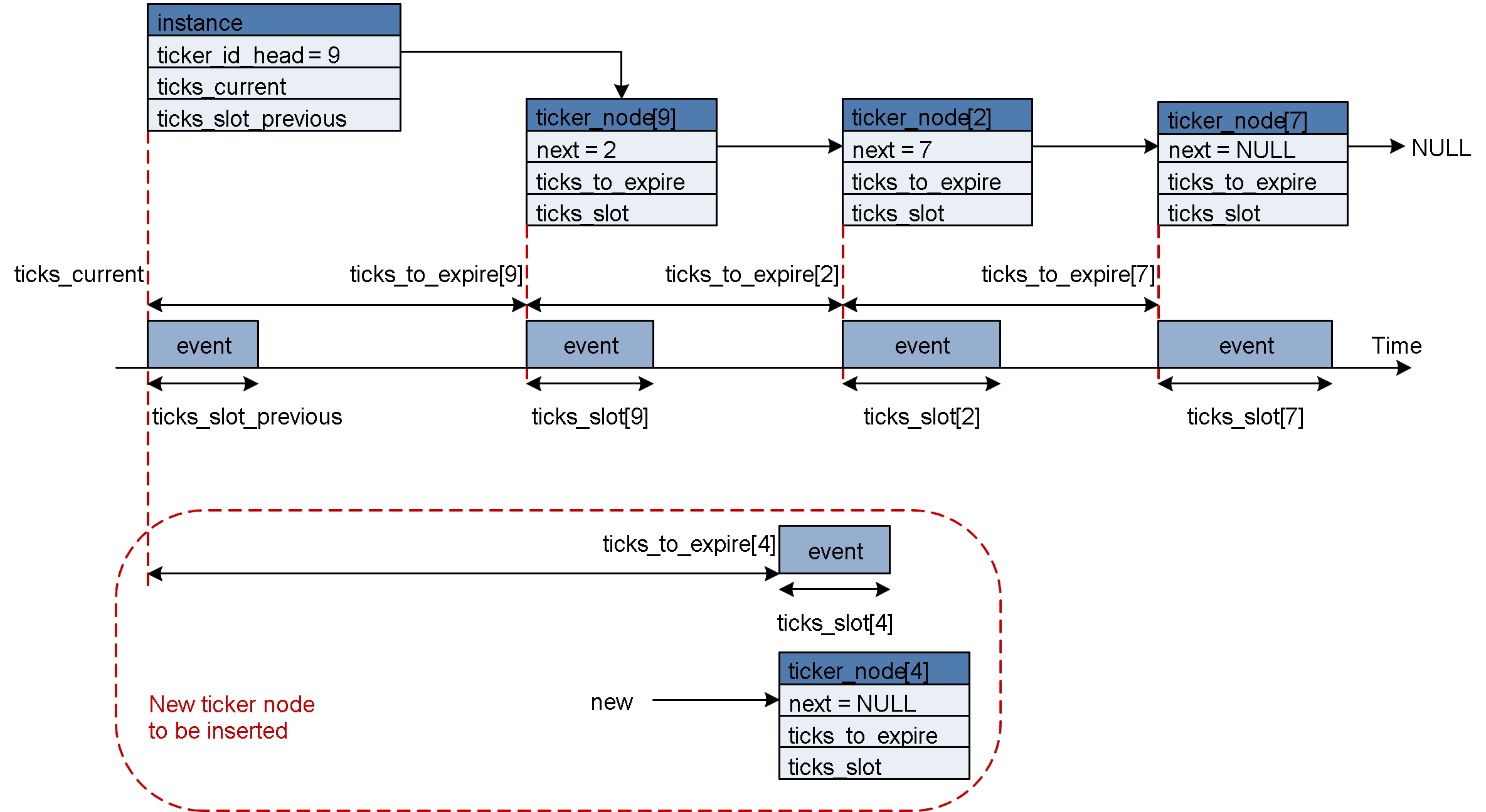
Ticker
Soft real time radio/resource scheduling
LL_SW
Software-based Link Layer implementation
States and roles, control procedures, packet controller
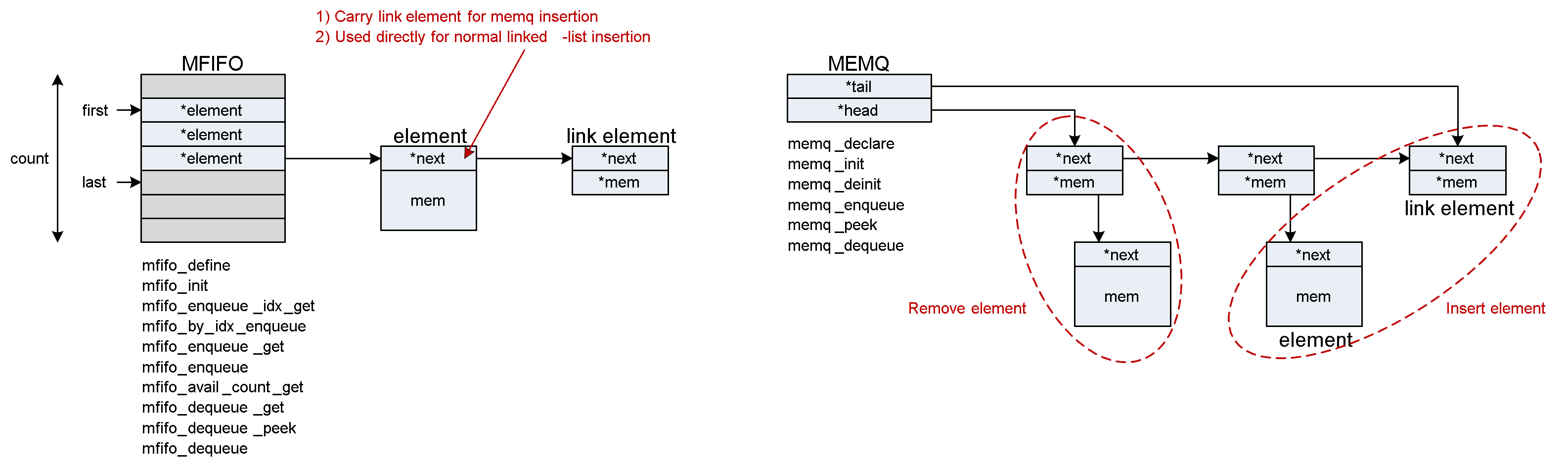
Util
Bare metal memory pool management
Queues of variable count, lockless usage
FIFO of fixed count, lockless usage
Mayfly concept based deferred ISR executions
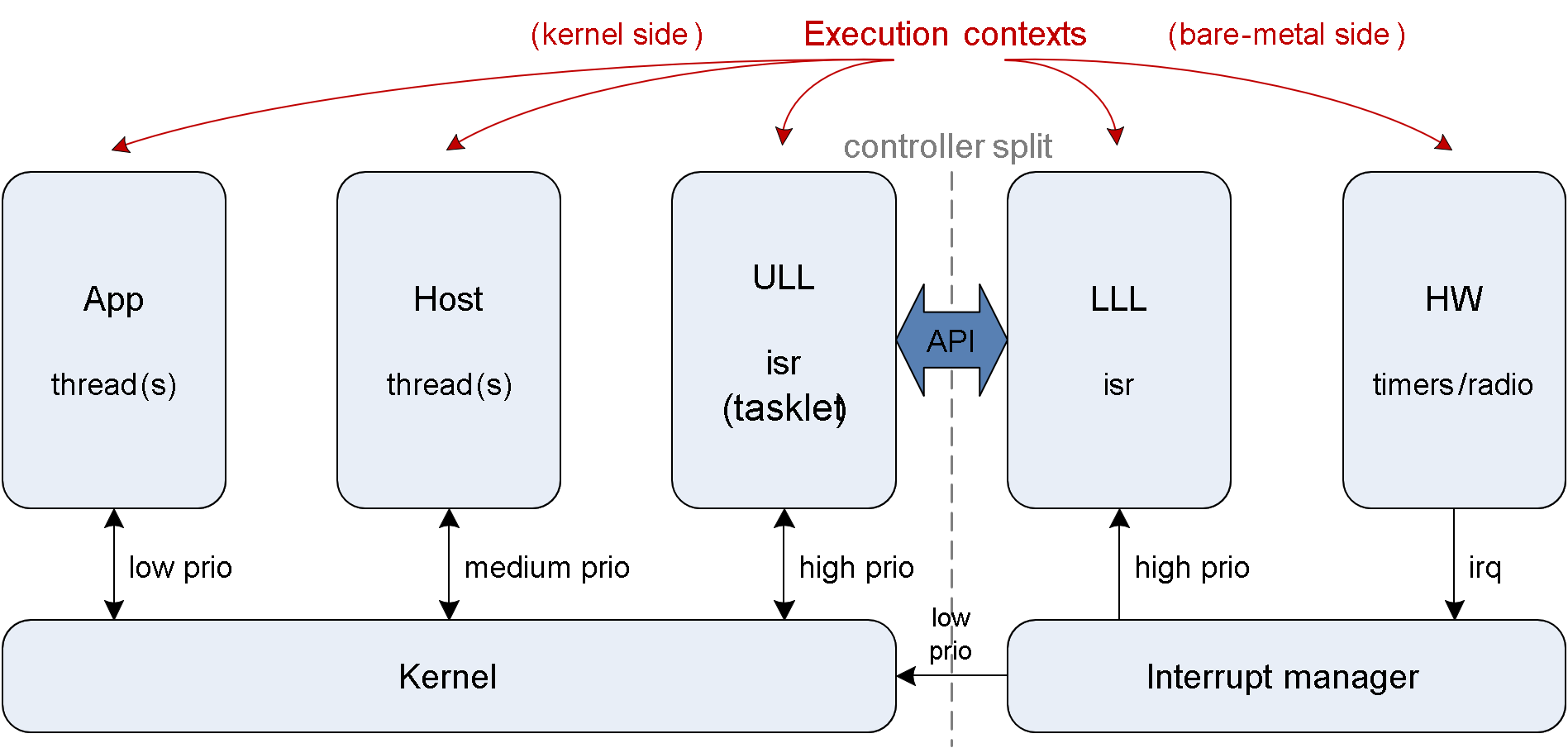
Architecture
Execution Overview
Architecture Overview
Scheduling
Ticker
Upper Link Layer and Lower Link Layer
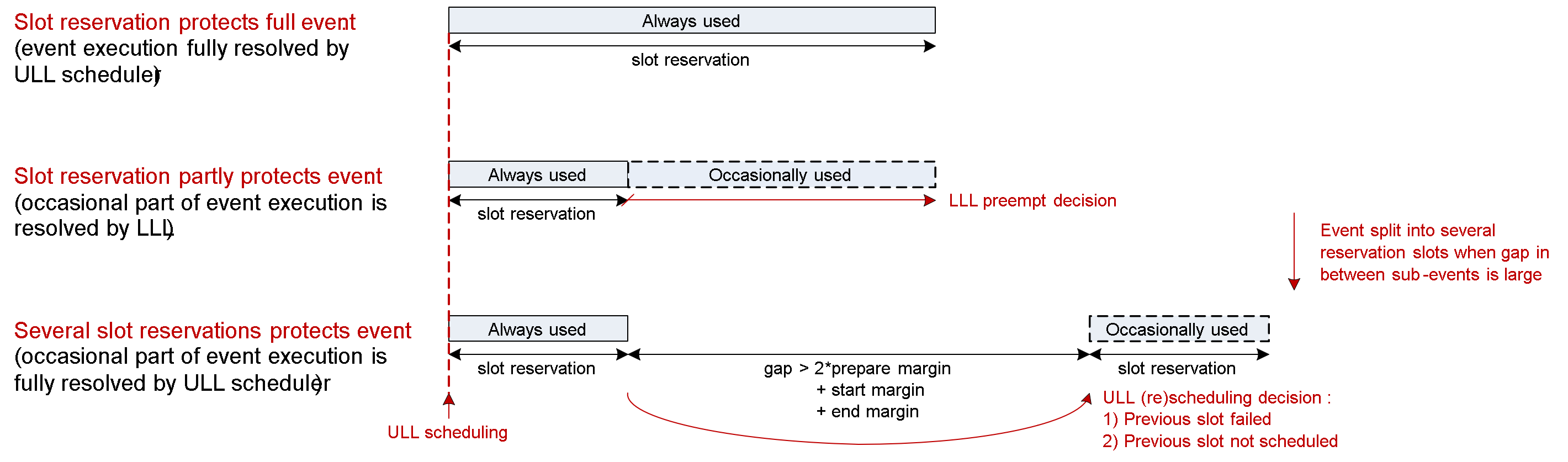
Scheduling Variants
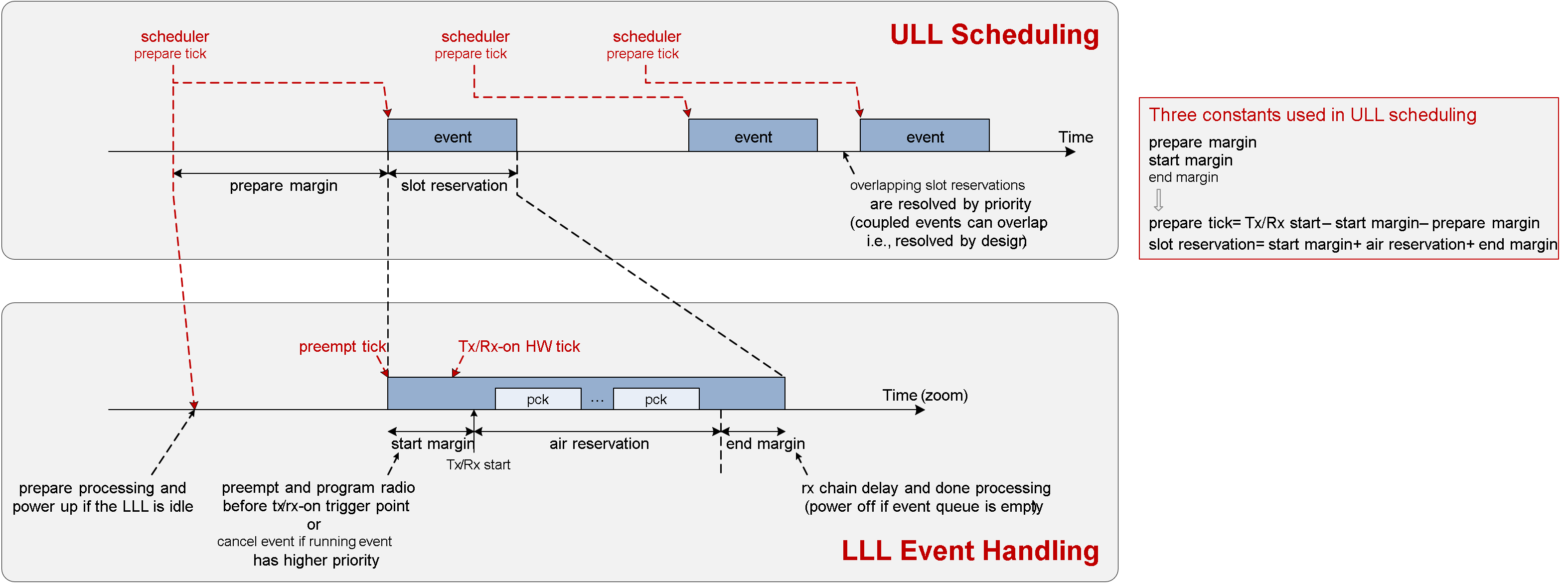
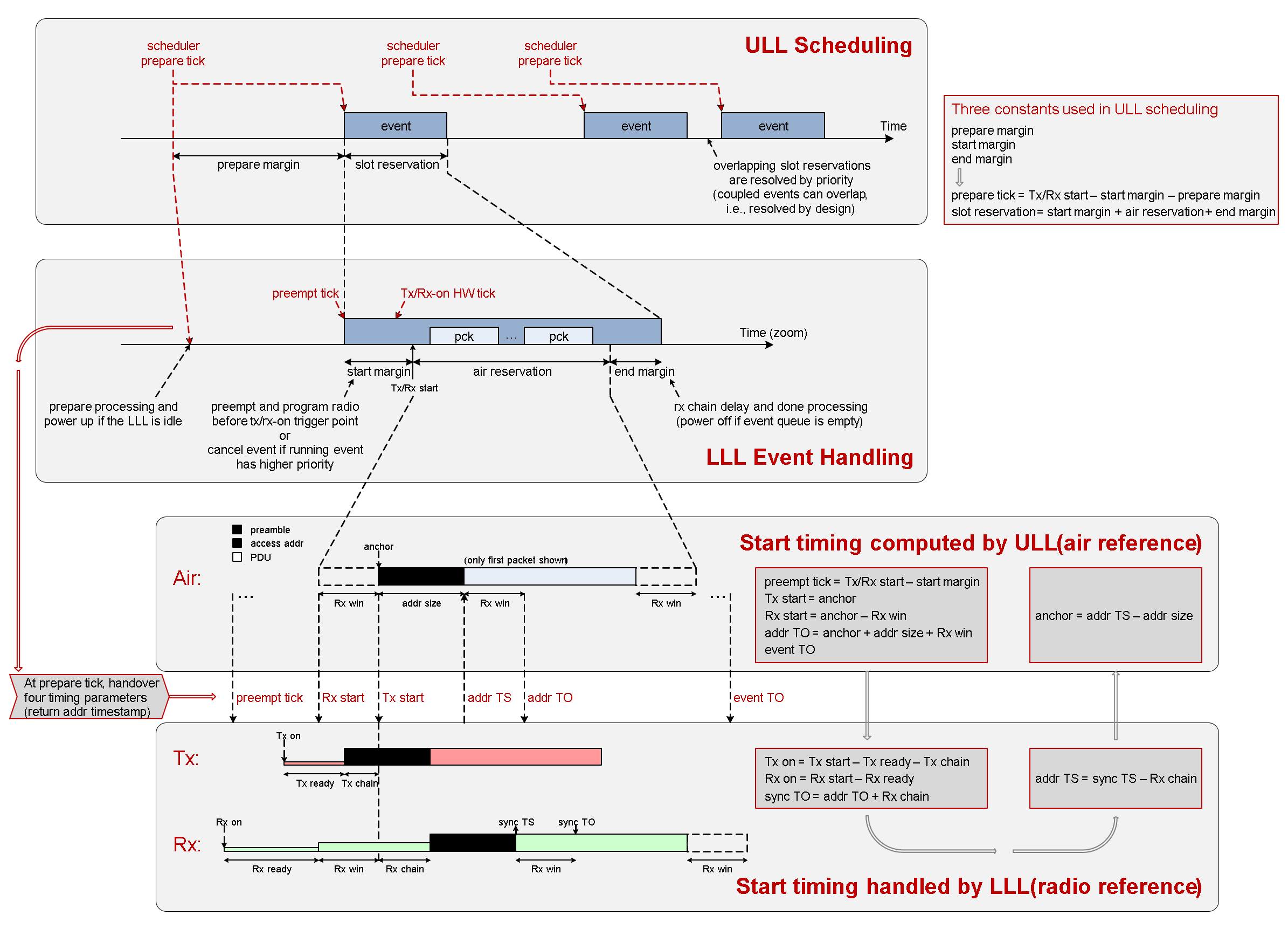
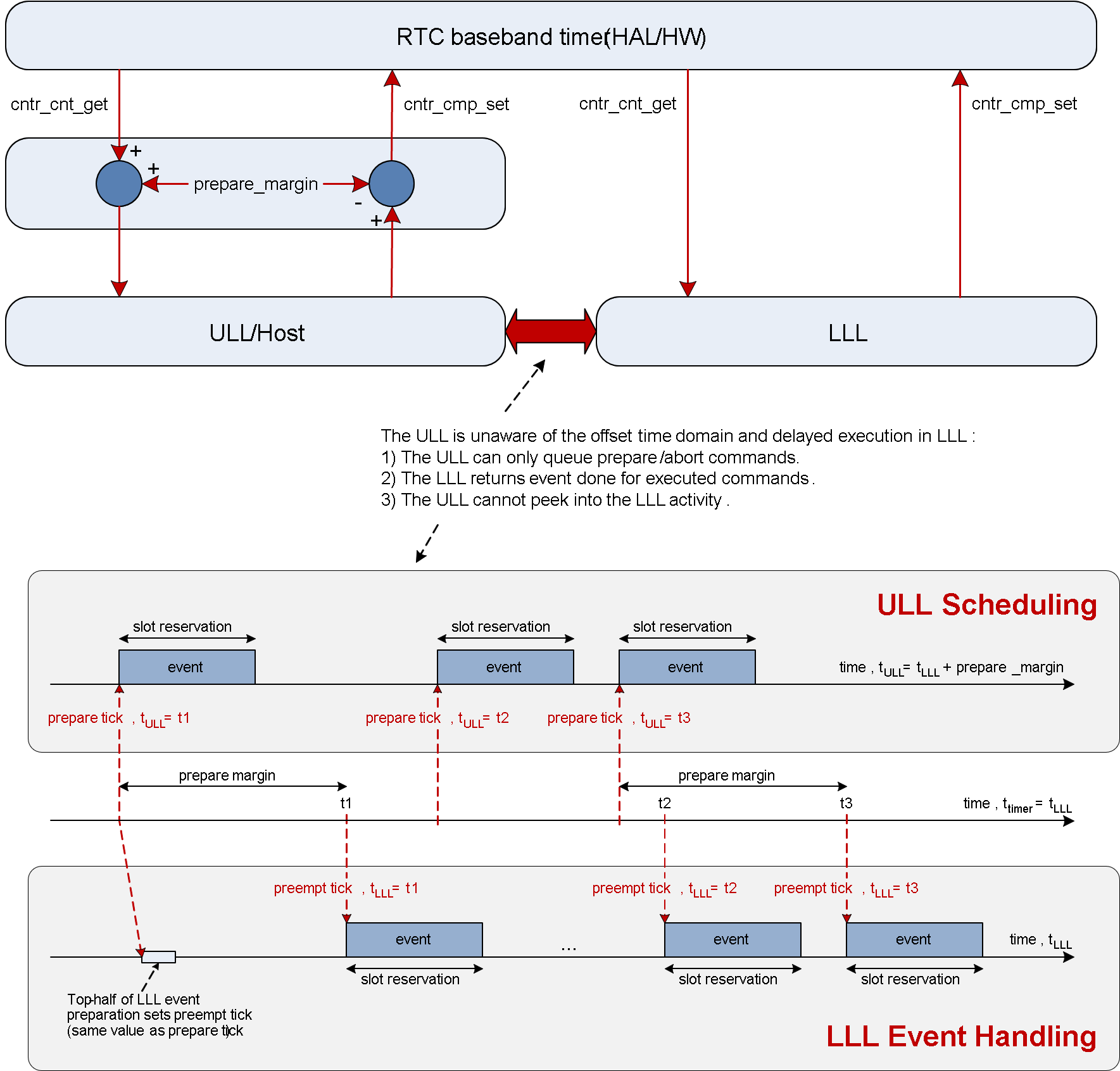
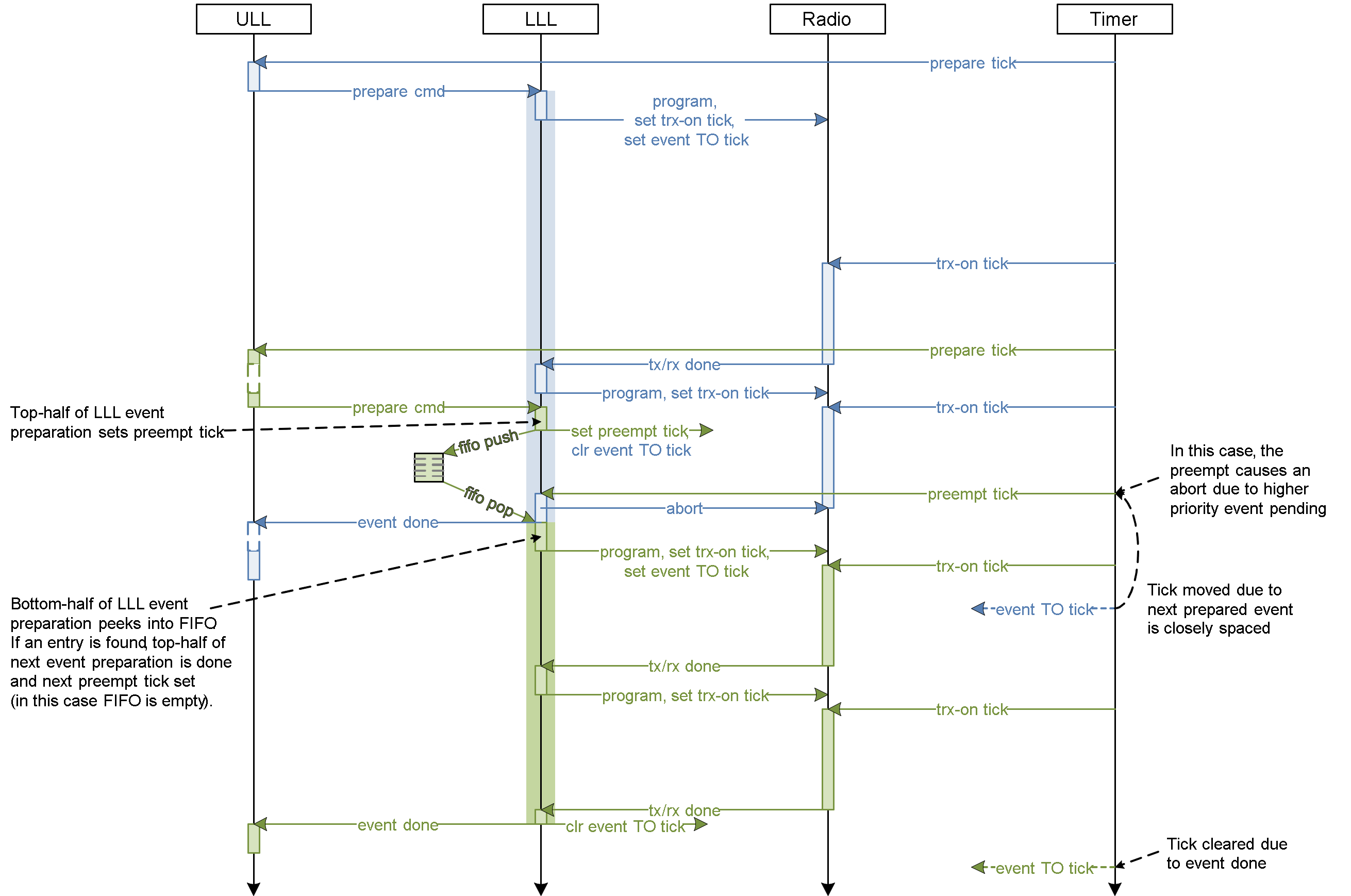
ULL and LLL Timing
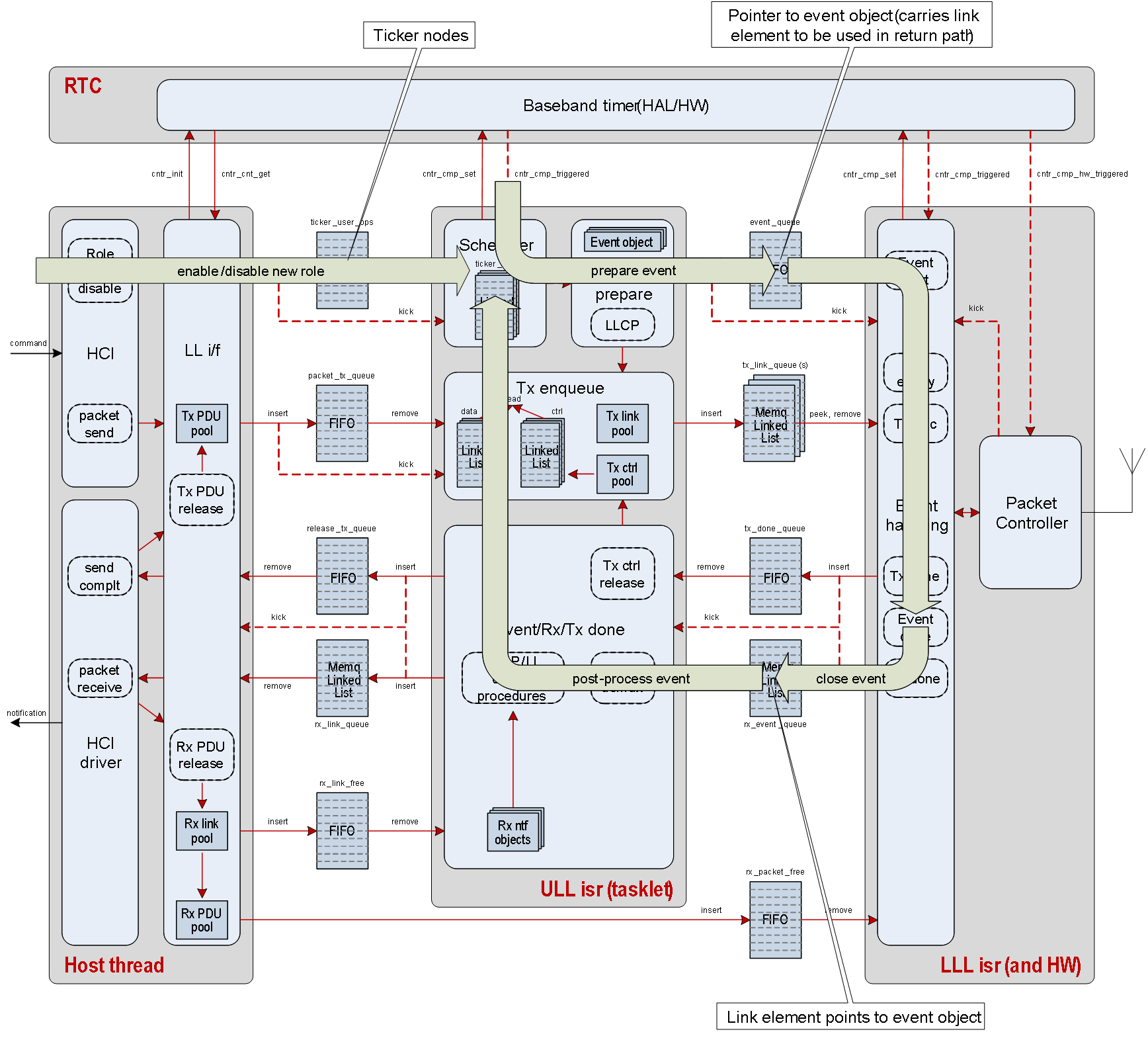
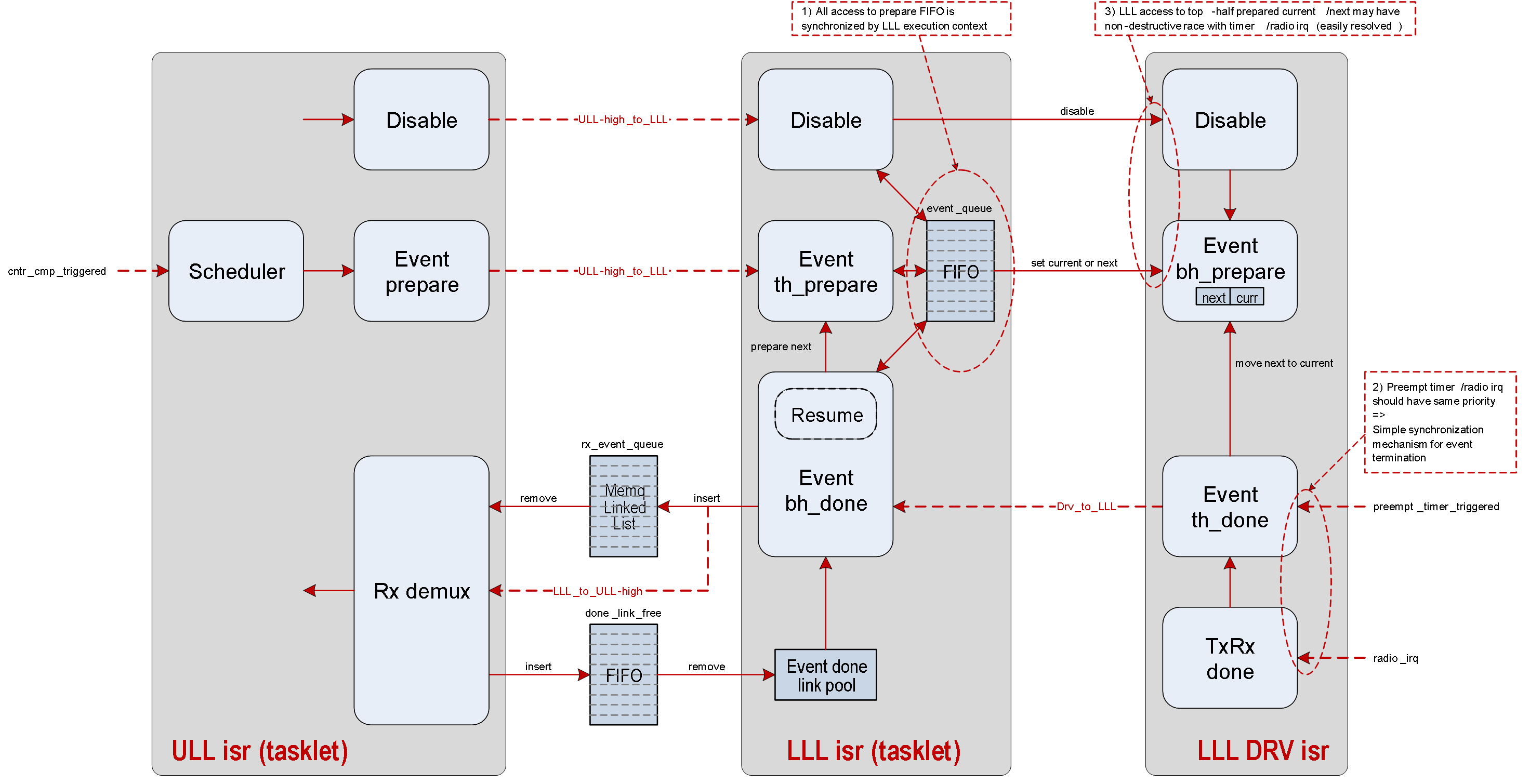
Event Handling
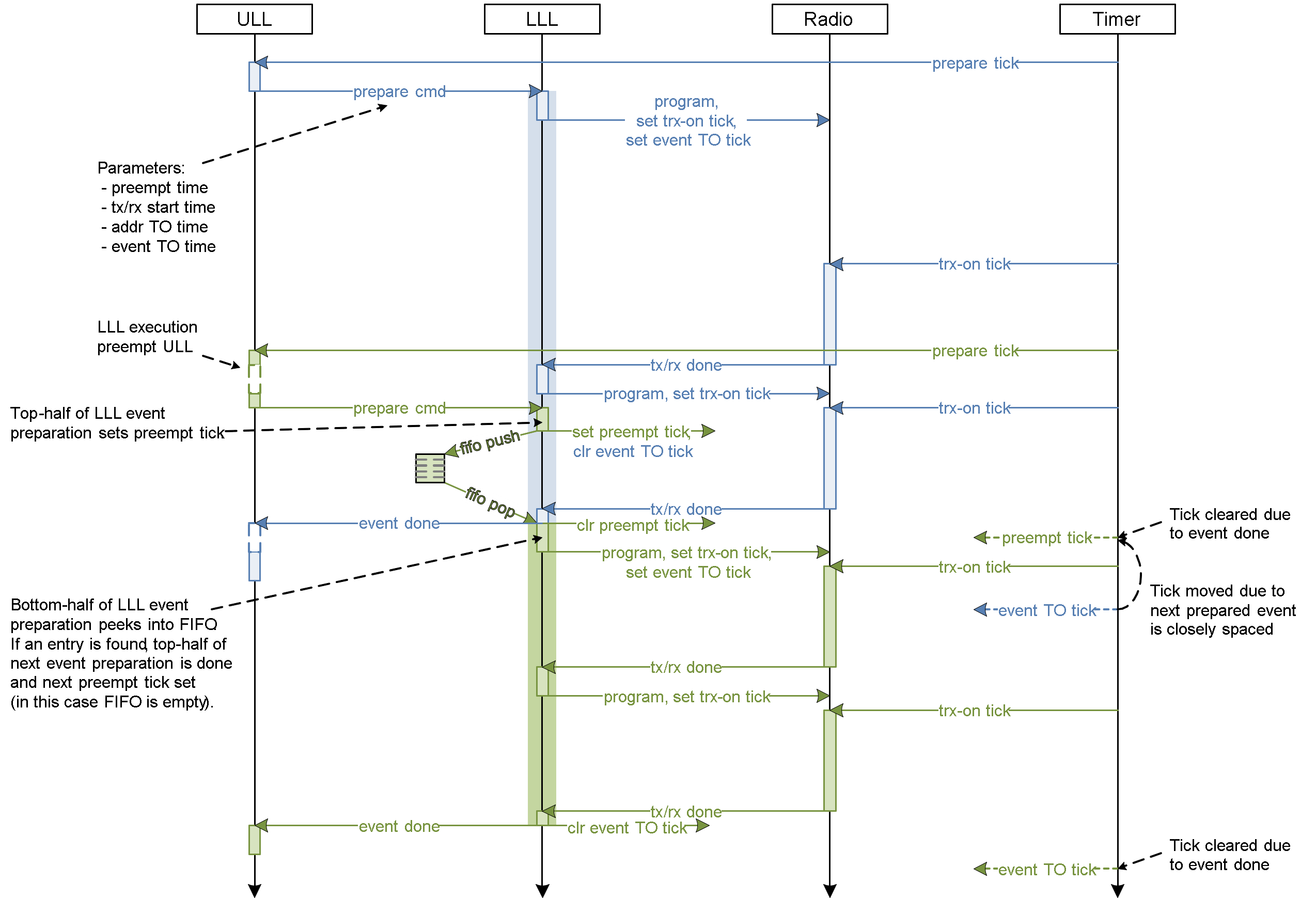
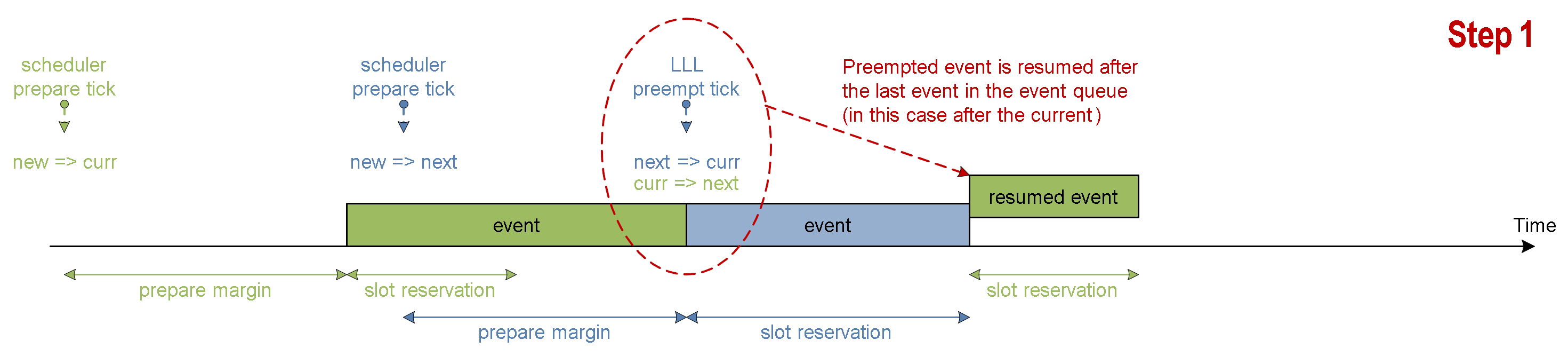
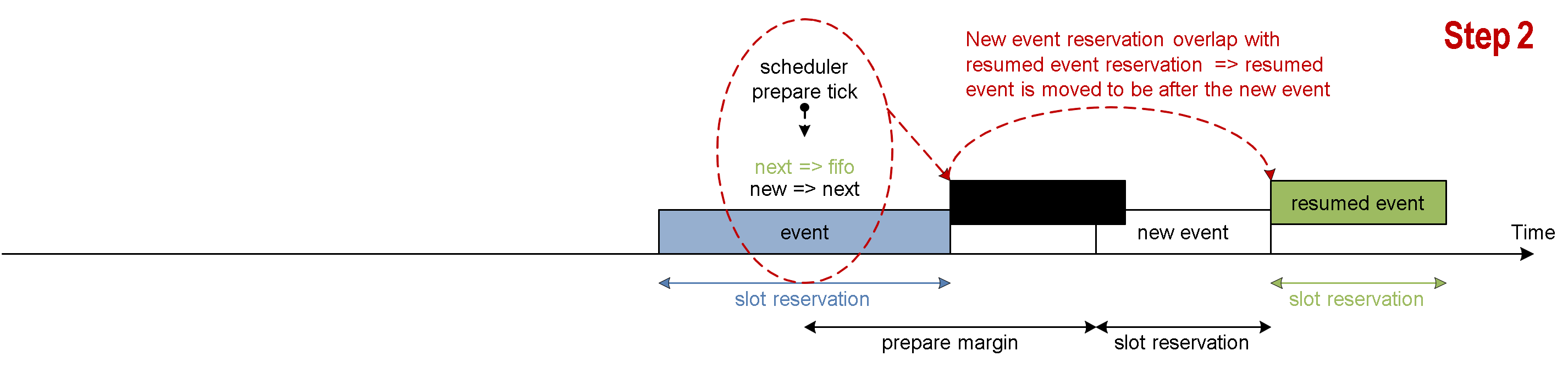
Scheduling Closely Spaced Events
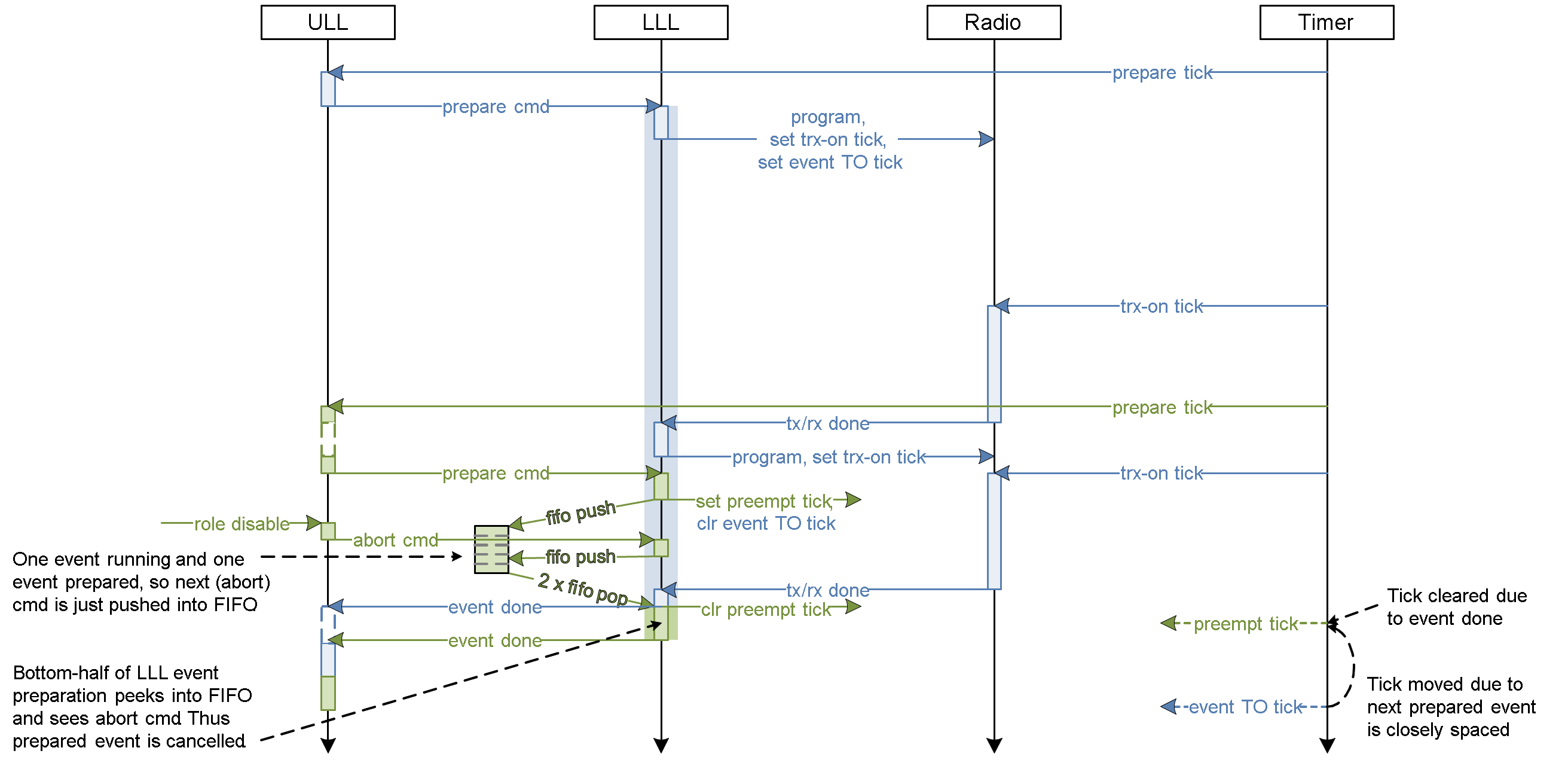
Aborting Active Event
Cancelling Pending Event
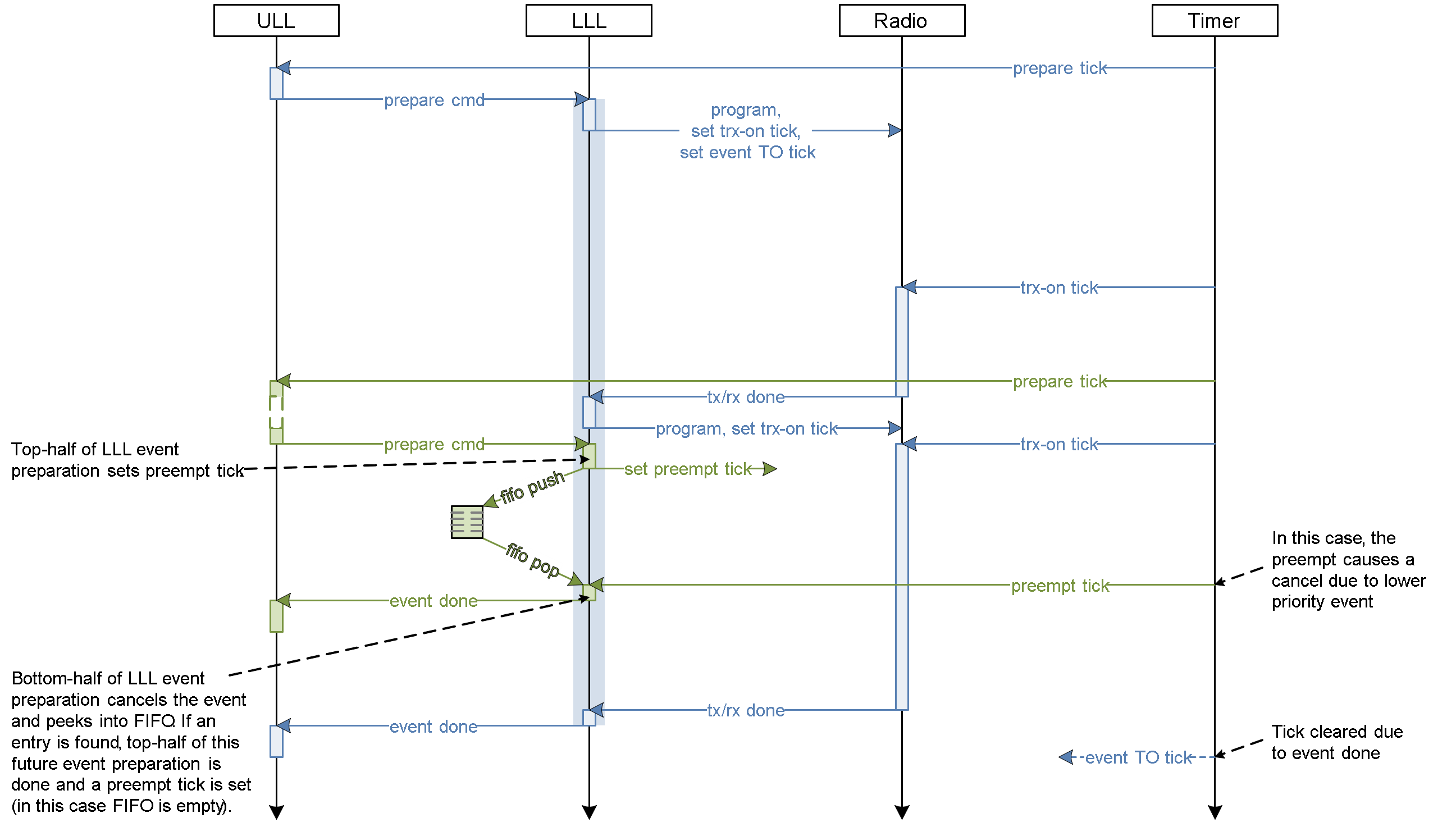
Pre-emption of Active Event
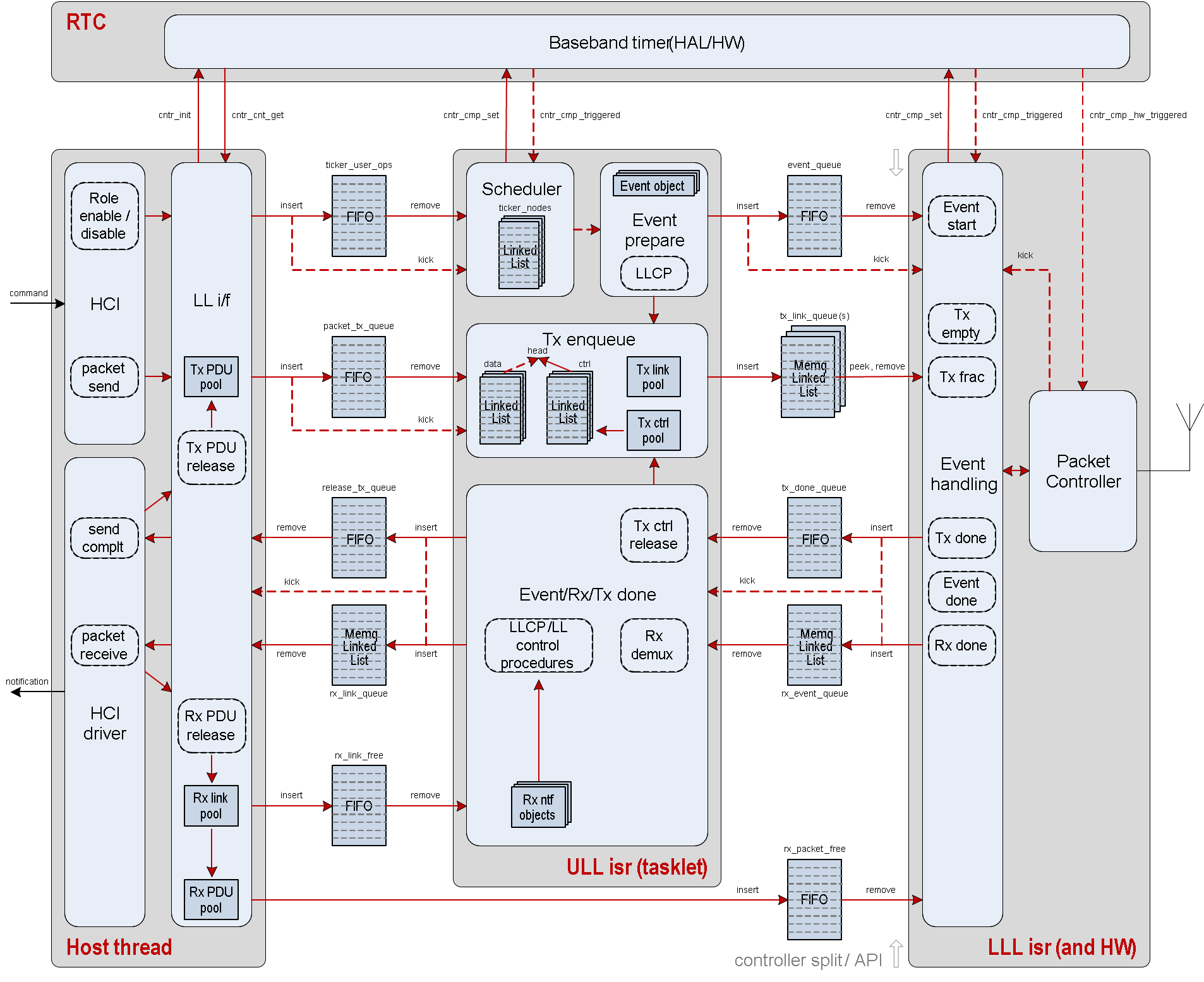
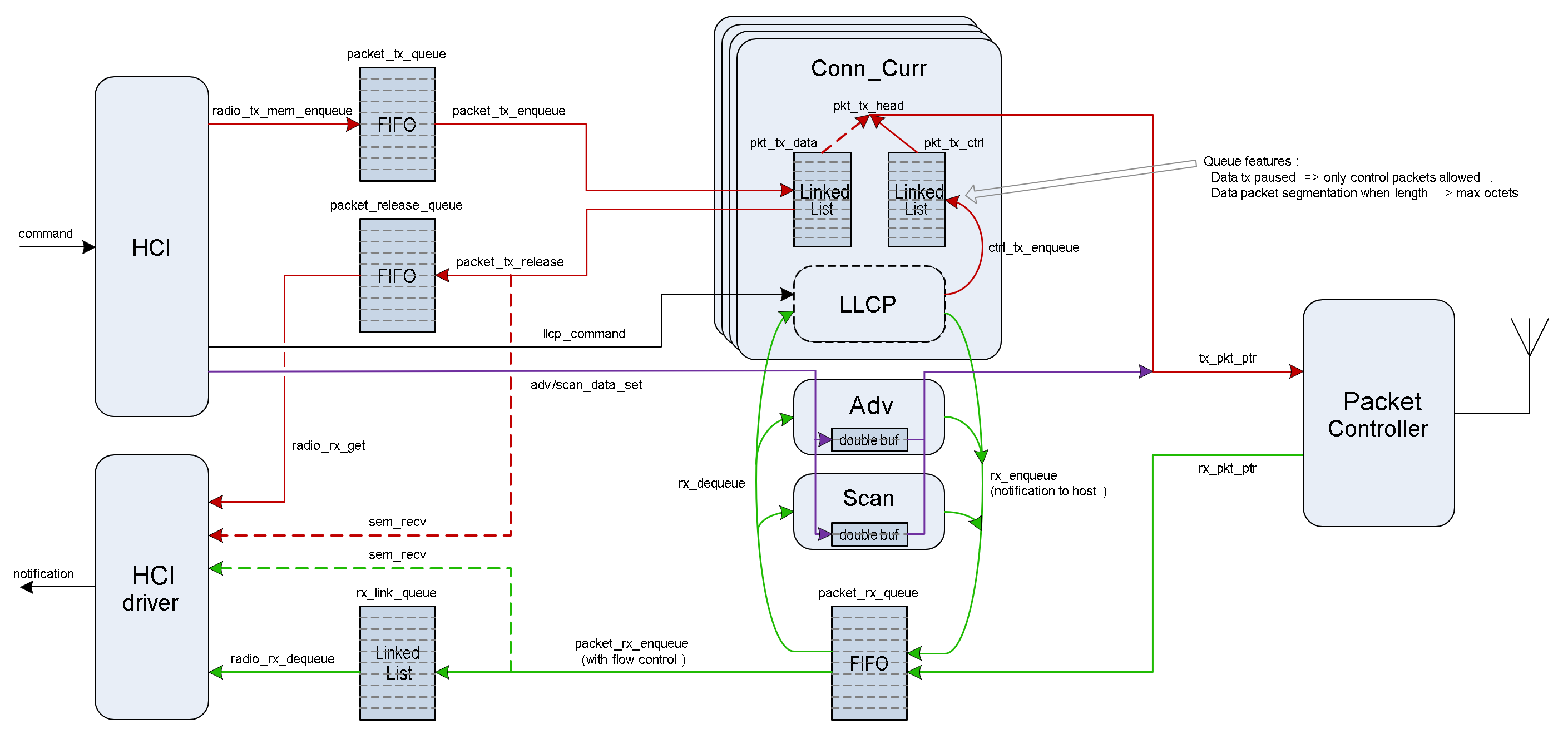
Data Flow
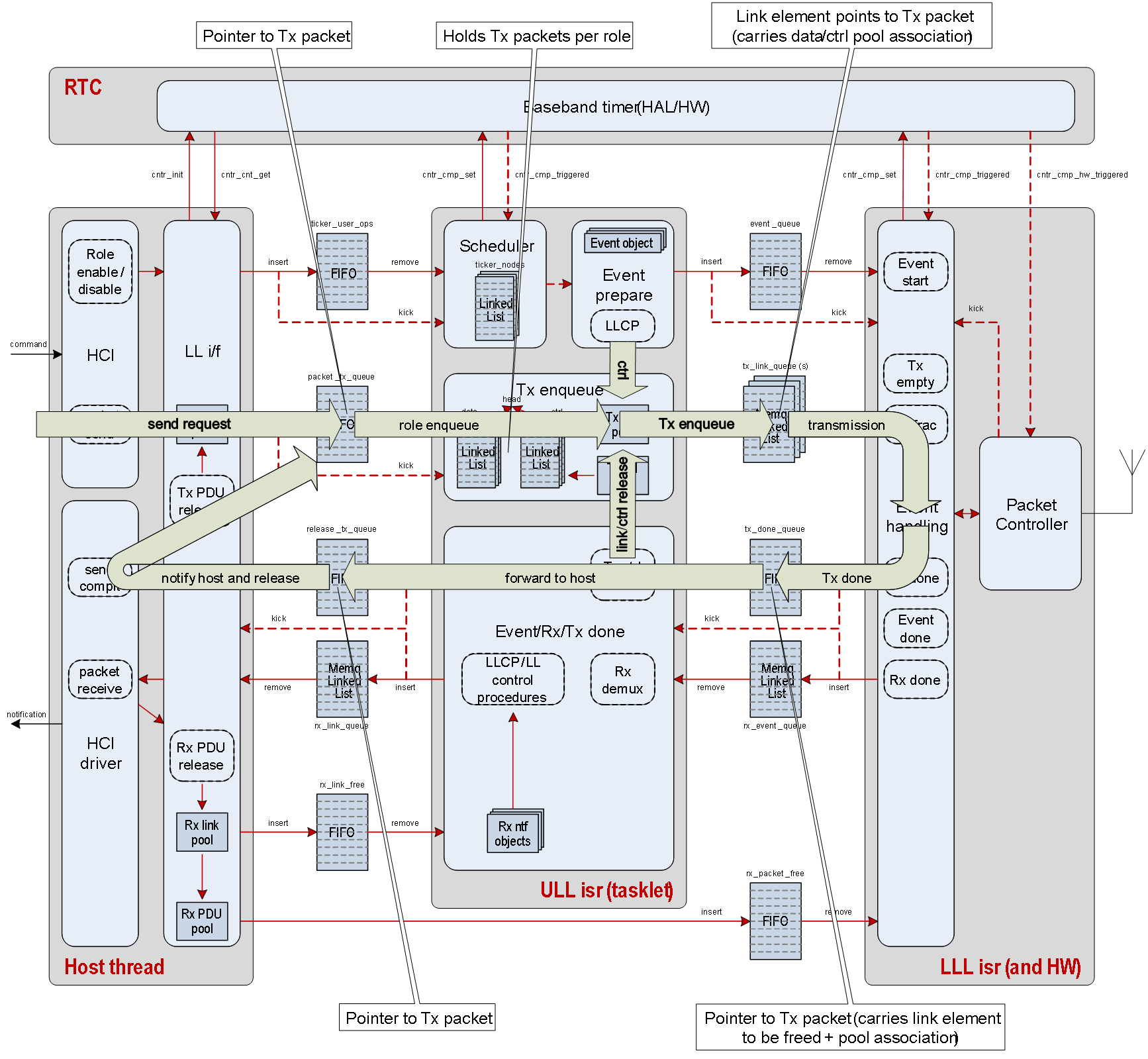
Transmit Data Flow
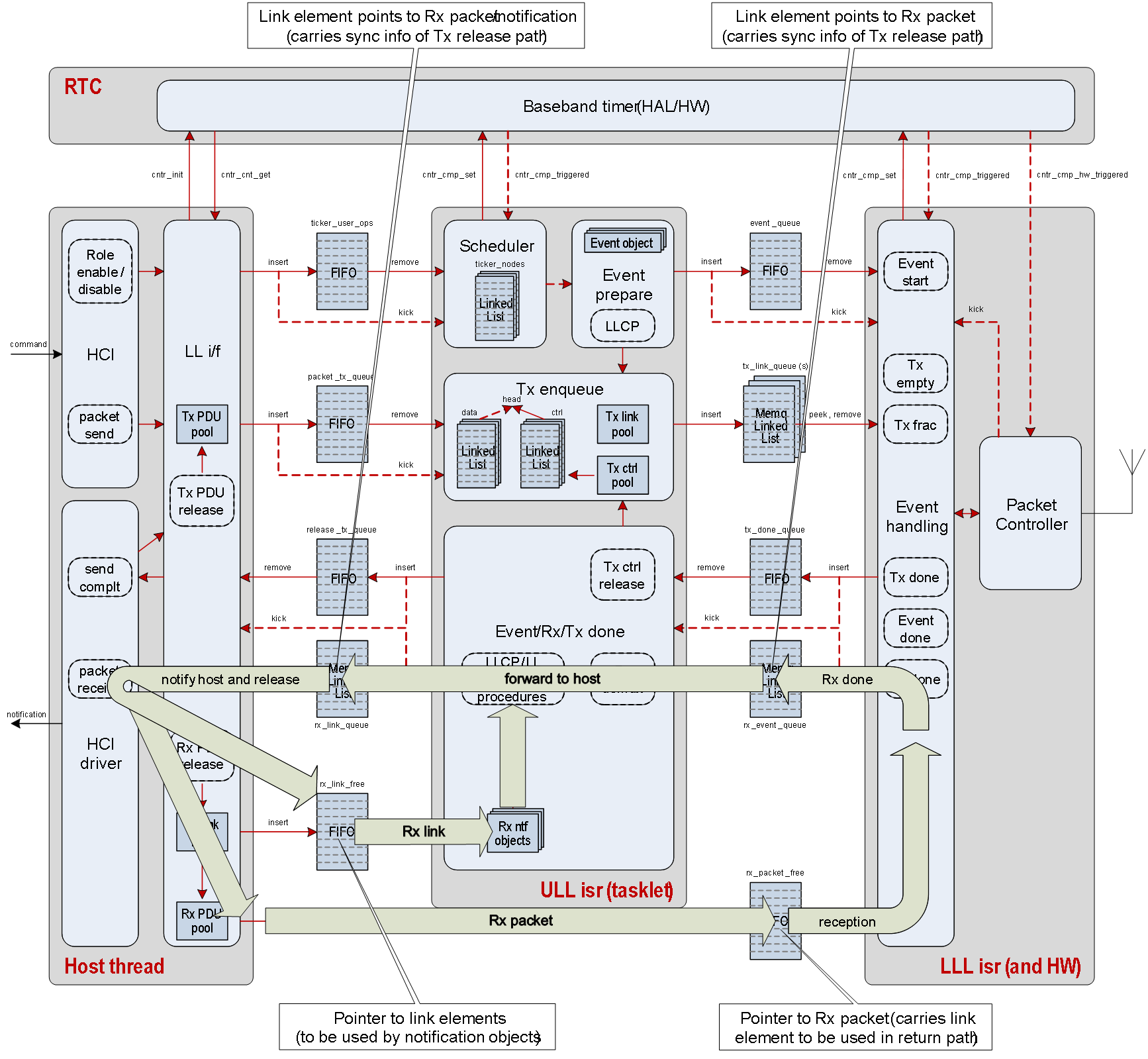
Receive Data Flow
Execution Priorities
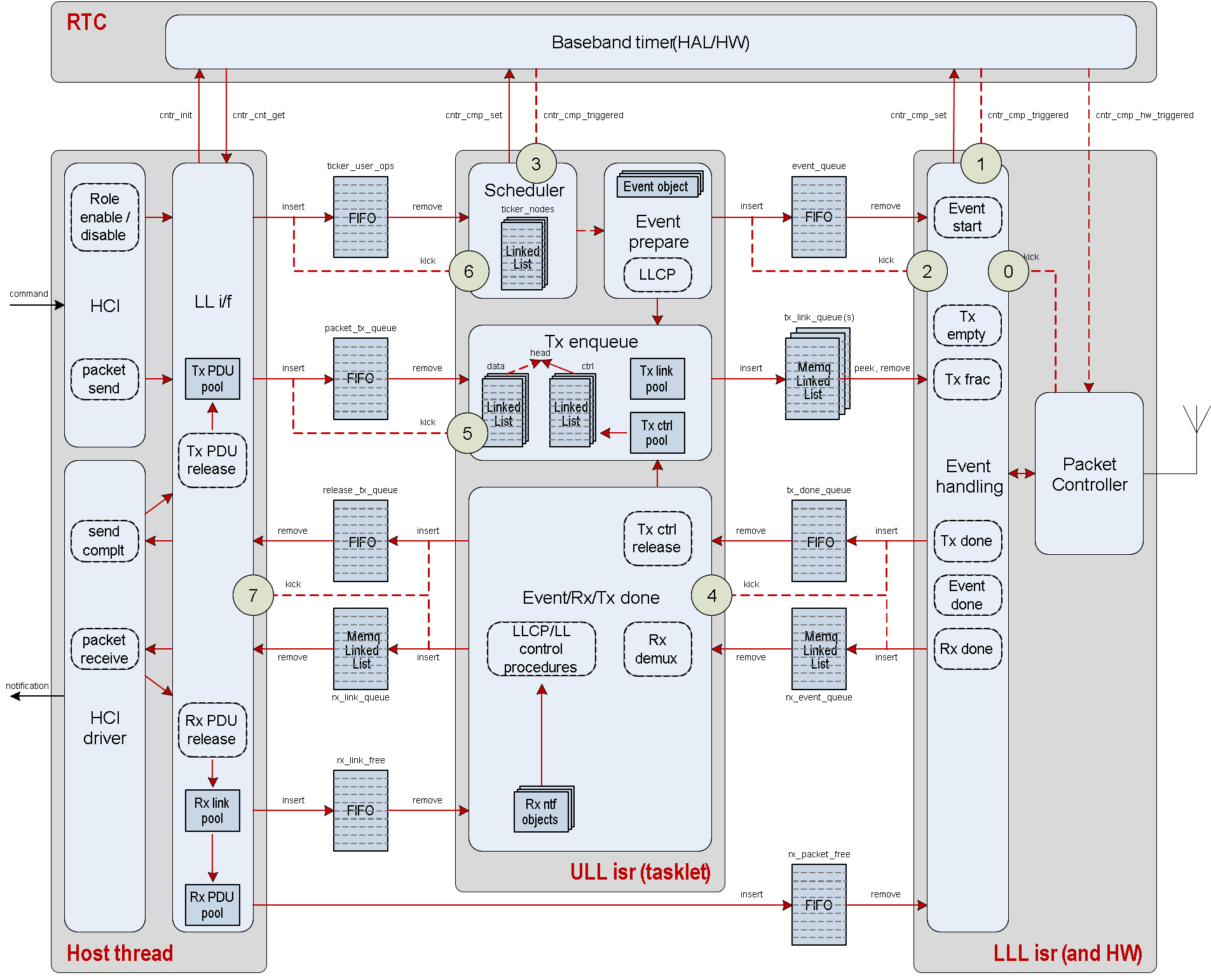
Event handle (0, 1) < Event preparation (2, 3) < Event/Rx done (4) < Tx request (5) < Role management (6) < Host (7).
LLL is vendor ISR, ULL is Mayfly ISR concept, Host is kernel thread.
Link Layer Control Procedures
Following is a brief fly in on the main concepts in the implementation of control procedures handling in ULL.
Three main execution contexts
- HCI/LLCP API
Miscellaneous procedure initiation API
From ull_llcp.c::ull_cp_<proc>() for initiating local procedures
Interface with running procedures, local and remote
- lll_prepare context to drive ull_cp_run()
LLCP main state machine entry/tick’er
From ull_peripheral.c/ull_central.c::ticker_cb via ull_conn_llcp()
- rx_demux context to drive ull_cp_tx_ack() and ull_cp_rx()
LLCP tx ack handling and PDU reception
From ull_conn.c::ull_conn_rx()
Handles passing PDUs into running procedures as well as possibly initiating remote procedures
Data structures and PDU helpers
- struct llcp_struct
Main LLCP data store
Defined in ull_conn_types.h and declared as part of struct ll_conn
Holds local and remote procedure request queues as well as conn specific LLCP data
Basic conn-level abstraction
- struct proc_ctx
General procedure context data, contains miscellaneous procedure data and state as well as sys_snode_t for queueing
Defined in ull_llcp_internal.h, declared/instantiated through ull_llcp.c::create_procedure()
Also holds node references used in tx_ack as well as rx_node retention mechanisms
- struct llcp_mem_pool
Mem pool used to implement procedure contexts resource - instantiated in both a local and a remote version
Used through ull_llcp.c::create_procedure()
- Miscellaneous pdu gymnastics
Encoding and decoding of control pdus done by ull_llcp_pdu.c::llcp_pdu_encode/decode_<PDU>()
Miscellaneous pdu validation handled by ull_llcp.c::pdu_validate_<PDU>() via ull_llcp.c::pdu_is_valid()
LLCP local and remote request/procedure state machines
- ull_llcp_local.c
State machine handling local initiated procedures
Naming concept: lr _<…> => local request machine
Local procedure queue handling
Local run/rx/tx_ack switch
- ull_llcp_remote.c
Remote versions of the above
Naming concept: rr_<…> => remote request machine
Also handling of remote procedure initiation by llcp_rx_new()
Miscellaneous procedure collision handling (in rr_st_idle())
- ull_llcp_common/conn_upd/phy/enc/cc/chmu.c
Individual procedure implementations (ull_llcp_common.c collects the simpler ones)
Naming concept: lp_<…> => local initiated procedure, rp_<…> => remote initiated procedure
Handling of procedure flow from init (possibly through instant) to completion and host notification if applicable
Miscellaneous concepts
- Procedure collision handling
See BT spec for explanation
Basically some procedures can exist in parallel but some can’t - for instance only one instant based at a time
Spec states rules for how to handle/resolve collisions when they happen
- Termination handling
Specific rules apply re. how termination is handled.
Since we have resource handling re. procedure contexts and terminate must always be available this is handled as a special case
Note also - there are miscellaneous cases where connection termination is triggered on invalid peer behavior
- New remote procedure handling
Table new_proc_lut[] maps LLCP PDUs to procedures/roles used in llcp_rr_new()
Note - for any given connection, there can only ever be ONE remote procedure in the remote procedure queue
- Miscellaneous minors
pause/resume concepts - there are two (see spec for details)
procedure execution can be paused by the encryption procedure
data TX can be paused by PHY, DLE and ENC procedure
RX node retention - ensures no waiting for allocation of RX node when needed for notification
Miscellaneous unit test concepts
- Individual ZTEST unit test for each procedure
zephyr/tests/bluetooth/controller/ctrl_<proc>
- Rx node handling is mocked
Different configs are handled by separate conf files (see ctrl_conn_update for example)
ZTEST(periph_rem_no_param_req, test_conn_update_periph_rem_accept_no_param_req)
- Emulated versions of rx_demux/prepare context used in unit tests - testing ONLY procedure PDU flow
event_prepare()/event_done() helpers emulating LLL prepare/done flow
lt_rx()/lt_tx() ‘lower tester’ emulation of rx/tx
ut_rx_node() ‘upper tester’ emulation of notification flow handling
Bunch of helpers to generate and parse PDUs, as well as miscellaneous mocked ull_stuff()
Lower Link Layer
LLL Execution
LLL Resume
Bare metal utilities
Memory FIFO and Memory Queue
Mayfly
Mayfly are multi-instance scalable ISR execution contexts
What a Work is to a Thread, Mayfly is to an ISR
List of functions executing in ISRs
Execution priorities map to IRQ priorities
Facilitate cross execution context scheduling
Race-to-idle execution
Lock-less, bare metal
Legacy Controller
Bluetooth Low Energy Controller - Vendor Specific Details
Hardware Requirements
Nordic Semiconductor
The Nordic Semiconductor Bluetooth Low Energy Controller implementation requires the following hardware peripherals.
Resource |
nRF Peripheral |
# instances |
Zephyr Driver Accessible |
Description |
|---|---|---|---|---|
Clock |
NRF_CLOCK |
1 |
Yes |
|
RTC [a] |
NRF_RTC0 |
1 |
No |
|
Timer |
2 or 1 [1] |
No |
|
|
PPI [b] |
NRF_PPI |
Yes [4] |
|
|
DPPI [c] |
NRF_DPPI |
20 channels, and 2 channel groups [3] |
Yes [4] |
|
SWI [d] |
NRF_SWI4 and NRF_SWI5, or NRF_SWI2 and NRF_SWI3 [5] |
2 |
No |
|
Radio |
NRF_RADIO |
1 |
No |
|
RNG [e] |
NRF_RNG |
1 |
Yes |
|
ECB [f] |
NRF_ECB |
1 |
No |
|
CBC-CCM [g] |
NRF_CCM |
1 |
No |
|
AAR [h] |
NRF_AAR |
1 |
No |
|
GPIO [i] |
NRF_GPIO |
2 GPIO pins for PA and LNA, 1 each |
Yes |
|
GPIOTE [j] |
NRF_GPIOTE |
1 |
Yes |
|
TEMP [k] |
NRF_TEMP |
1 |
Yes |
|
UART [l] |
NRF_UART0 |
1 |
Yes |
|
IPC [m] |
NRF_IPC [5] |
1 |
Yes |
|
Real Time Counter (RTC)
Programmable Peripheral Interconnect (PPI)
Distributed Programmable Peripheral Interconnect (DPPI)
Software Interrupt (SWI)
Random Number Generator (RNG)
AES Electronic Codebook Mode Encryption (ECB)
Cipher Block Chaining (CBC) - Message Authentication Code with Counter Mode encryption (CCM)
Accelerated Address Resolver (AAR)
General Purpose Input Output (GPIO)
GPIO tasks and events (GPIOTE)
Temperature sensor (TEMP)
Universal Asynchronous Receiver Transmitter (UART)
Interprocess Communication peripheral (IPC)